# 加载模型
到目前为止,我们一直在手动创建模型。虽然这也可行,但如果想处理有大量多边形的复杂模型,这样做的效率会非常低。正因为如此,我们需要修改代码来支持 obj 模型格式,这样就可以在诸如 blender 这样的软件中创建模型,并在我们的应用中显示了。
由于现在的 main.rs 文件已经有些杂乱,我们可以再创建一个 model.rs 文件,在此放置用于加载模型的代码:
// model.rs
pub trait Vertex {
fn desc<'a>() -> wgpu::VertexBufferLayout<'a>;
}
#[repr(C)]
#[derive(Copy, Clone, Debug, bytemuck::Pod, bytemuck::Zeroable)]
pub struct ModelVertex {
position: [f32; 3],
tex_coords: [f32; 2],
normal: [f32; 3],
}
impl Vertex for ModelVertex {
fn desc<'a>() -> wgpu::VertexBufferLayout<'a> {
todo!();
}
}
可以注意到这里有几个重点。首先在 main.rs 中我们将 Vertex 建模成了一个 struct,而这里使用的则是一个 trait,以便支持多种顶点类型(如模型、用户界面、实例数据等)。将 Vertex 建模为 trait 也使我们能抽离出 VertexBufferLayout 创建部分的代码,从而简化 RenderPipeline 的创建。
另一个重点是 ModelVertex 中的 normal 字段。在讨论光照问题前我们还不会使用这个字段,但现在我们会先把它添加到 struct 中。
下面让我们来定义 VertexBufferLayout:
impl Vertex for ModelVertex {
fn desc<'a>() -> wgpu::VertexBufferLayout<'a> {
use std::mem;
wgpu::VertexBufferLayout {
array_stride: mem::size_of::<ModelVertex>() as wgpu::BufferAddress,
step_mode: wgpu::VertexStepMode::Vertex,
attributes: &[
wgpu::VertexAttribute {
offset: 0,
shader_location: 0,
format: wgpu::VertexFormat::Float32x3,
},
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 3]>() as wgpu::BufferAddress,
shader_location: 1,
format: wgpu::VertexFormat::Float32x2,
},
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 5]>() as wgpu::BufferAddress,
shader_location: 2,
format: wgpu::VertexFormat::Float32x3,
},
],
}
}
}
这部分代码基本上与原来的 VertexBufferLayout 相同,但我们为 normal 增加了一个 VertexAttribute。另外也可以删除 main.rs 中的 Vertex struct,因为它也已经用不到了。在 RenderPipeline 中,也应当使用从模型中所获得的新 Vertex:
let render_pipeline = device.create_render_pipeline(&wgpu::RenderPipelineDescriptor {
// ...
vertex: wgpu::VertexState {
// ...
buffers: &[model::ModelVertex::desc(), InstanceRaw::desc()],
},
// ...
});
由于 desc 方法是在 Vertex trait 上实现的,因此在访问该方法前需导入该 trait。为此只需将导入的内容放在代码文件顶部即可:
use model::Vertex;
在此之后,我们需要一个用于渲染的模型。如果你手头已经有了模型那自然很好。如果还没有,这里也提供了一个带有模型及其中所有纹理的 zip 文件。我们将这个模型放在与现有 src 目录相邻的一个新 res 目录中。
# 从资源目录中获取文件
当 cargo 构建并运行程序时,它会设置一个当前工作目录。这个目录通常是放置了项目根目录下 Cargo.toml 的目录。我们资源目录所在的路径也可能有所不同,这取决于项目的结构。本节教程示例代码的 res 目录位于 code/beginner/tutorial9-models/res/。当加载模型时可以使用这个路径,只需附加上 cube.obj 即可。这样确实可用,但如果我们改变项目目录结构,就会使代码不可用。
我们将通过修改构建脚本来解决这个问题。只需将 res 目录复制到 cargo 创建可执行文件的位置,然后再从那里引用资源即可。为此可以创建一个名为 build.rs 的文件,添加以下内容:
use anyhow::*;
use fs_extra::copy_items;
use fs_extra::dir::CopyOptions;
use std::env;
fn main() -> Result<()> {
// 这里告诉 cargo 如果 /res/ 目录中的任何内容发生了变化,就重新运行脚本
println!("cargo:rerun-if-changed=res/*");
let out_dir = env::var("OUT_DIR")?;
let mut copy_options = CopyOptions::new();
copy_options.overwrite = true;
let mut paths_to_copy = Vec::new();
paths_to_copy.push("res/");
copy_items(&paths_to_copy, out_dir, ©_options)?;
Ok(())
}
请确保将 build.rs 放在与 Cargo.toml 相同的目录中。否则在 crate 构建时 cargo 不会运行构建脚本。
OUT_DIR 是一个环境变量,cargo 用它来指定应用构建产物的输出位置。
另外还要修改 Cargo.toml 来让上述改动能正常工作。为此需在 [dependencies] 位置添加以下内容:
[build-dependencies]
anyhow = "1.0"
fs_extra = "1.2"
glob = "0.3"
# 使用 TOBJ 加载模型
我们将用 tobj 库来加载模型。首先将其添加到 Cargo.toml 中:
[dependencies]
# other dependencies...
tobj = "3.0"
不过在能加载模型前,我们还需要能在代码中放下它:
// model.rs
pub struct Model {
pub meshes: Vec<Mesh>,
pub materials: Vec<Material>,
}
可以注意到我们的 Model struct 中分别有一个用于 meshes(网格)和 materials(材质)的 Vec。这一点很重要,因为 obj 文件中可以包含多份网格和材质。然后我们仍然需要创建 Mesh 和 Material 类,像这样:
pub struct Material {
pub name: String,
pub diffuse_texture: texture::Texture,
pub bind_group: wgpu::BindGroup,
}
pub struct Mesh {
pub name: String,
pub vertex_buffer: wgpu::Buffer,
pub index_buffer: wgpu::Buffer,
pub num_elements: u32,
pub material: usize,
}
Material 相当简单,其中只有一个名称字段和一个纹理字段。我们的立方体 obj 文件中实际上有 2 个纹理,但其中一个是法线贴图,我们将在后面对其作介绍。名称字段更多是为了调试而加入的。
说到纹理,我们需要为 texture.rs 中的 Texture 添加一个 load() 方法:
use std::path::Path;
pub fn load<P: AsRef<Path>>(
device: &wgpu::Device,
queue: &wgpu::Queue,
path: P,
) -> Result<Self> {
// 需要这样处理来满足 borrow checker
let path_copy = path.as_ref().to_path_buf();
let label = path_copy.to_str();
let img = image::open(path)?;
Self::from_image(device, queue, &img, label)
}
在为模型加载纹理时,load 方法会非常有用。这是因为 include_bytes! 要求我们在编译时知道文件名,但我们对模型纹理并不能真正保证这一点。
既然如此,我们也可以在 model.rs 中导入 texture.rs:
use crate::texture;
我们还需要对 texture.rs 中的 from_image() 方法做一点细微的改动。由于 PNG 图像有 alpha 通道,它们在 as_rgba8() 时运行良好。但 JPEG 图像没有 alpha 通道,如果我们试图在要使用的 JPEG 纹理图像上调用 as_rgba8(),代码就会出问题。不过相反地,我们可以使用 to_rgba8() 来处理这样的图像。这样即使原始图像没有 alpha 通道,这个 API 也会生成一个新的图像缓冲区:
let rgba = img.to_rgba8();
由于 rgba 现在是一个新的图像缓冲区,而不是对原始图像缓冲区的引用,因此当后面调用 write_texture 时,需要以引用形式来传递它:
//...
&rgba, // UPDATED!
wgpu::ImageDataLayout {
Mesh 中持有一个顶点缓冲区、一个索引缓冲区,以及网格中的索引数。我们使用一个 usize 来表示材质,这个 usize 将在绘制时用于索引 materials 列表:
完成这些之后,就可以开始加载模型了:
impl Model {
pub fn load<P: AsRef<Path>>(
device: &wgpu::Device,
queue: &wgpu::Queue,
layout: &wgpu::BindGroupLayout,
path: P,
) -> Result<Self> {
let (obj_models, obj_materials) = tobj::load_obj(path.as_ref(), &LoadOptions {
triangulate: true,
single_index: true,
..Default::default()
},
)?;
let obj_materials = obj_materials?;
// 我们假设纹理文件是和 obj 文件一起存储的
let containing_folder = path.as_ref().parent()
.context("Directory has no parent")?;
let mut materials = Vec::new();
for mat in obj_materials {
let diffuse_path = mat.diffuse_texture;
let diffuse_texture = texture::Texture::load(device, queue, containing_folder.join(diffuse_path))?;
let bind_group = device.create_bind_group(&wgpu::BindGroupDescriptor {
layout,
entries: &[
wgpu::BindGroupEntry {
binding: 0,
resource: wgpu::BindingResource::TextureView(&diffuse_texture.view),
},
wgpu::BindGroupEntry {
binding: 1,
resource: wgpu::BindingResource::Sampler(&diffuse_texture.sampler),
},
],
label: None,
});
materials.push(Material {
name: mat.name,
diffuse_texture,
bind_group,
});
}
let mut meshes = Vec::new();
for m in obj_models {
let mut vertices = Vec::new();
for i in 0..m.mesh.positions.len() / 3 {
vertices.push(ModelVertex {
position: [
m.mesh.positions[i * 3],
m.mesh.positions[i * 3 + 1],
m.mesh.positions[i * 3 + 2],
],
tex_coords: [m.mesh.texcoords[i * 2], m.mesh.texcoords[i * 2 + 1]],
normal: [
m.mesh.normals[i * 3],
m.mesh.normals[i * 3 + 1],
m.mesh.normals[i * 3 + 2],
],
});
}
let vertex_buffer = device.create_buffer_init(
&wgpu::util::BufferInitDescriptor {
label: Some(&format!("{:?} Vertex Buffer", path.as_ref())),
contents: bytemuck::cast_slice(&vertices),
usage: wgpu::BufferUsages::VERTEX,
}
);
let index_buffer = device.create_buffer_init(
&wgpu::util::BufferInitDescriptor {
label: Some(&format!("{:?} Index Buffer", path.as_ref())),
contents: bytemuck::cast_slice(&m.mesh.indices),
usage: wgpu::BufferUsages::INDEX,
}
);
meshes.push(Mesh {
name: m.name,
vertex_buffer,
index_buffer,
num_elements: m.mesh.indices.len() as u32,
material: m.mesh.material_id.unwrap_or(0),
});
}
Ok(Self { meshes, materials })
}
}
# 渲染网格
在能够绘制模型前,我们需要能绘制一份独立的网格。为此可创建一个名为 DrawModel 的 trait,并为 RenderPass 实现它:
pub trait DrawModel<'a> {
fn draw_mesh(&mut self, mesh: &'a Mesh);
fn draw_mesh_instanced(
&mut self,
mesh: &'a Mesh,
instances: Range<u32>,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a,
{
fn draw_mesh(&mut self, mesh: &'b Mesh) {
self.draw_mesh_instanced(mesh, 0..1);
}
fn draw_mesh_instanced(
&mut self,
mesh: &'b Mesh,
instances: Range<u32>,
){
self.set_vertex_buffer(0, mesh.vertex_buffer.slice(..));
self.set_index_buffer(mesh.index_buffer.slice(..), wgpu::IndexFormat::Uint32);
self.draw_indexed(0..mesh.num_elements, 0, instances);
}
}
我们也可以把这些方法放在 impl Model 中,但笔者认为让 RenderPass 做所有的渲染更加合理,因为这就是它的职责。这样就意味着我们在渲染时必须导入 DrawModel:
// main.rs
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
render_pass.set_bind_group(0, &self.diffuse_bind_group, &[]);
render_pass.set_bind_group(1, &self.camera_bind_group, &[]);
use model::DrawModel;
render_pass.draw_mesh_instanced(&self.obj_model.meshes[0], 0..self.instances.len() as u32);
但在此之前,我们需要实际加载模型并将其保存到 State。为此可在 State::new() 中加入以下内容:
let res_dir = std::path::Path::new(env!("OUT_DIR")).join("res");
let obj_model = model::Model::load(
&device,
&queue,
&texture_bind_group_layout,
res_dir.join("cube.obj"),
).unwrap();
这里我们用 OUT_DIR 来获取 res 目录路径。
我们的新模型比之前的模型还要大一些,所以我们需要调整一下实例之间的间距:
const SPACE_BETWEEN: f32 = 3.0;
let instances = (0..NUM_INSTANCES_PER_ROW).flat_map(|z| {
(0..NUM_INSTANCES_PER_ROW).map(move |x| {
let x = SPACE_BETWEEN * (x as f32 - NUM_INSTANCES_PER_ROW as f32 / 2.0);
let z = SPACE_BETWEEN * (z as f32 - NUM_INSTANCES_PER_ROW as f32 / 2.0);
let position = cgmath::Vector3 { x, y: 0.0, z };
let rotation = if position.is_zero() {
cgmath::Quaternion::from_axis_angle(cgmath::Vector3::unit_z(), cgmath::Deg(0.0))
} else {
cgmath::Quaternion::from_axis_angle(position.normalize(), cgmath::Deg(45.0))
};
Instance {
position, rotation,
}
})
}).collect::<Vec<_>>();
完成后应该获得这样的效果:
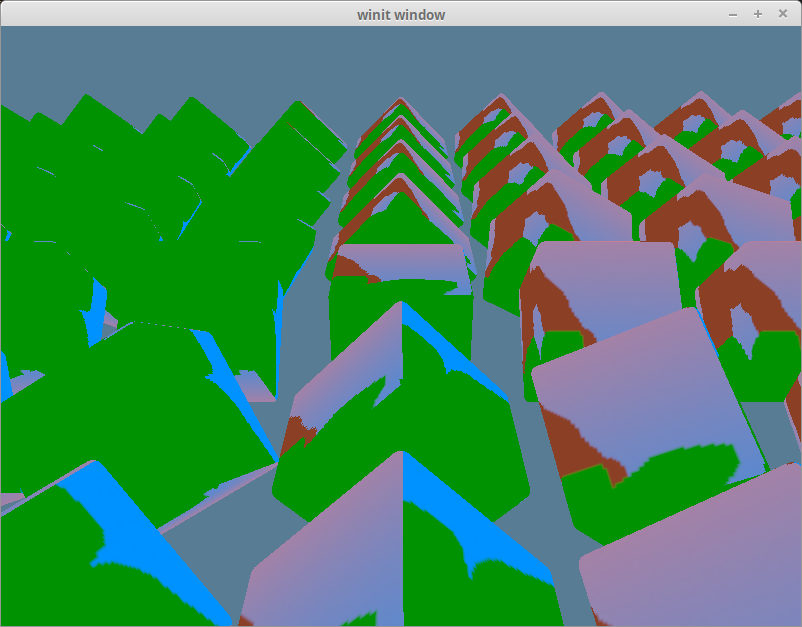
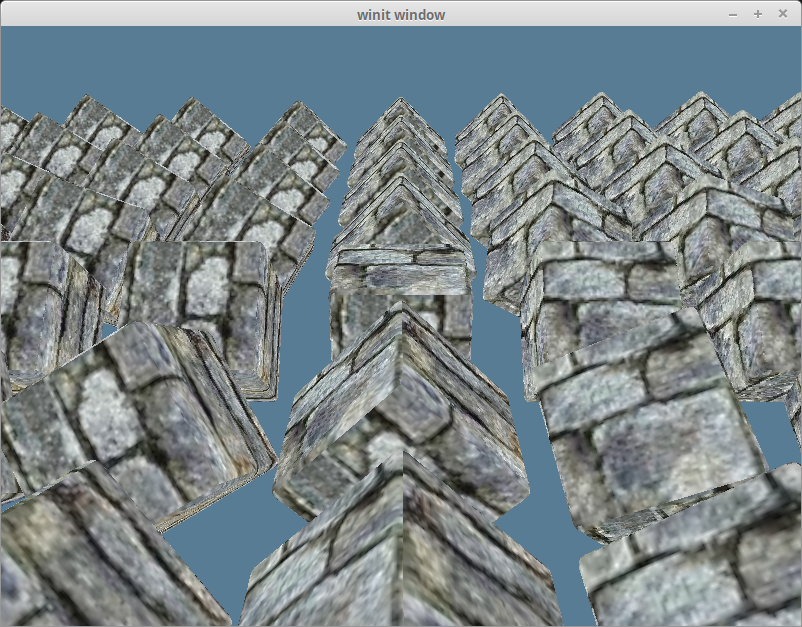
# 使用正确纹理
如果你检查一下 obj 对应的纹理文件,你会发现它们与原始 obj 文件并不匹配。我们想看到的纹理是这样的:

但我们得到的仍然是快乐小树的纹理。
这个问题的原因很简单,是因为尽管我们已经创建了纹理,但还没有创建一个 bind group 给到 RenderPass。我们仍然在使用旧的 diffuse_bind_group。如果想改变这一点,就要使用我们材质的 bind group,即 Material struct 下的 bind_group 成员。
我们先要给 DrawModel 添加一个材质参数。
pub trait DrawModel<'a> {
fn draw_mesh(&mut self, mesh: &'a Mesh, material: &'a Material, camera_bind_group: &'a wgpu::BindGroup);
fn draw_mesh_instanced(
&mut self,
mesh: &'a Mesh,
material: &'a Material,
instances: Range<u32>,
camera_bind_group: &'a wgpu::BindGroup,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a,
{
fn draw_mesh(&mut self, mesh: &'b Mesh, material: &'b Material, camera_bind_group: &'b wgpu::BindGroup) {
self.draw_mesh_instanced(mesh, material, 0..1, camera_bind_group);
}
fn draw_mesh_instanced(
&mut self,
mesh: &'b Mesh,
material: &'b Material,
instances: Range<u32>,
camera_bind_group: &'b wgpu::BindGroup,
) {
self.set_vertex_buffer(0, mesh.vertex_buffer.slice(..));
self.set_index_buffer(mesh.index_buffer.slice(..), wgpu::IndexFormat::Uint32);
self.set_bind_group(0, &material.bind_group, &[]);
self.set_bind_group(1, camera_bind_group, &[]);
self.draw_indexed(0..mesh.num_elements, 0, instances);
}
}
然后还需要修改渲染代码以使其生效:
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
let mesh = &self.obj_model.meshes[0];
let material = &self.obj_model.materials[mesh.material];
render_pass.draw_mesh_instanced(mesh, material, 0..self.instances.len() as u32, &self.camera_bind_group);
在此基础上,我们应该能获得以下效果:
# 渲染完整模型
现在我们直接指定好了网格和材质,这在想用不同的材质来绘制网格时会很有用。另外如果模型由多个部分组成,我们还不能渲染出模型的其他部分。为此可在 DrawModel 上创建一个方法,其中可按模型中各部分的材质来对其做绘制:
pub trait DrawModel<'a> {
// ...
fn draw_model(&mut self, model: &'a Model, camera_bind_group: &'a wgpu::BindGroup);
fn draw_model_instanced(
&mut self,
model: &'a Model,
instances: Range<u32>,
camera_bind_group: &'a wgpu::BindGroup,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a, {
// ...
fn draw_model(&mut self, model: &'b Model, camera_bind_group: &'b wgpu::BindGroup) {
self.draw_model_instanced(model, 0..1, camera_bind_group);
}
fn draw_model_instanced(
&mut self,
model: &'b Model,
instances: Range<u32>,
camera_bind_group: &'b wgpu::BindGroup,
) {
for mesh in &model.meshes {
let material = &model.materials[mesh.material];
self.draw_mesh_instanced(mesh, material, instances.clone(), camera_bind_group);
}
}
}
main.rs 中代码也需要相应的改变:
render_pass.set_vertex_buffer(1, self.instance_buffer.slice(..));
render_pass.set_pipeline(&self.render_pipeline);
render_pass.draw_model_instanced(&self.obj_model, 0..self.instances.len() as u32, &self.camera_bind_group);