# 🚧 法线贴图
With just lighting, our scene is already looking pretty good. Still, our models are still overly smooth. This is understandable because we are using a very simple model. If we were using a texture that was supposed to be smooth, this wouldn't be a problem, but our brick texture is supposed to be rougher. We could solve this by adding more geometry, but that would slow our scene down, and it be would hard to know where to add new polygons. This is were normal mapping comes in.
Remember in the instancing tutorial, we experimented with storing instance data in a texture? A normal map is doing just that with normal data! We'll use the normals in the normal map in our lighting calculation in addition to the vertex normal.
The brick texture I found came with a normal map. Let's take a look at it!
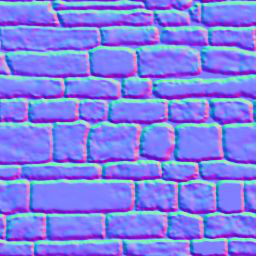
The r, g, and b components of the texture correspond to the x, y, and z components or the normals. All the z values should be positive, that's why the normal map has a bluish tint.
We'll need to modify our Material struct in model.rs to include a normal_texture.
pub struct Material {
pub name: String,
pub diffuse_texture: texture::Texture,
pub normal_texture: texture::Texture, // UPDATED!
pub bind_group: wgpu::BindGroup,
}
We'll have to update the texture_bind_group_layout to include the normal map as well.
let texture_bind_group_layout = device.create_bind_group_layout(&wgpu::BindGroupLayoutDescriptor {
entries: &[
// ...
// normal map
wgpu::BindGroupLayoutEntry {
binding: 2,
visibility: wgpu::ShaderStages::FRAGMENT,
ty: wgpu::BindingType::Texture {
multisampled: false,
sample_type: wgpu::TextureSampleType::Float { filterable: true },
view_dimension: wgpu::TextureViewDimension::D2,
},
count: None,
},
wgpu::BindGroupLayoutEntry {
binding: 3,
visibility: wgpu::ShaderStages::FRAGMENT,
ty: wgpu::BindingType::Sampler(wgpu::SamplerBindingType::Filtering),
count: None,
},
],
label: Some("texture_bind_group_layout"),
});
We'll need to actually load the normal map. We'll do this in the loop we create the materials in.
let diffuse_path = mat.diffuse_texture;
let diffuse_texture = texture::Texture::load(device, queue, containing_folder.join(diffuse_path))?;
let normal_path = mat.normal_texture;
let normal_texture = texture::Texture::load(device, queue, containing_folder.join(normal_path))?;
- Note: I duplicated and moved the
command_buffers.push(cmds);line. This means we can reuse thecmdsvariable for both the normal map and diffuse/color map.
Our Material's bind_group will have to change as well.
let bind_group = device.create_bind_group(&wgpu::BindGroupDescriptor {
layout,
entries: &[
// ...
wgpu::BindGroupEntry {
binding: 2,
resource: wgpu::BindingResource::TextureView(&normal_texture.view),
},
wgpu::BindGroupEntry {
binding: 3,
resource: wgpu::BindingResource::Sampler(&normal_texture.sampler),
},
],
label: None,
});
Don't forget to pass the normal_texture into the Material struct!
materials.push(Material {
name: mat.name,
diffuse_texture,
normal_texture, // NEW!
bind_group,
});
Now we can add use the texture in the fragment shader.
// Fragment shader
[[group(0), binding(0)]]
var t_diffuse: texture_2d<f32>;
[[group(0), binding(1)]]
var s_diffuse: sampler;
[[group(0), binding(2)]]
var t_normal: texture_2d<f32>;
[[group(0), binding(3)]]
var s_normal: sampler;
[[stage(fragment)]]
fn fs_main(in: VertexOutput) -> [[location(0)]] vec4<f32> {
let object_color: vec4<f32> = textureSample(t_diffuse, s_diffuse, in.tex_coords);
let object_normal: vec4<f32> = textureSample(t_normal, s_normal, in.tex_coords);
// We don't need (or want) much ambient light, so 0.1 is fine
let ambient_strength = 0.1;
let ambient_color = light.color * ambient_strength;
// Create the lighting vectors
let tangent_normal = object_normal.xyz * 2.0 - 1.0;
let light_dir = normalize(light.position - in.world_position);
let view_dir = normalize(camera.view_pos.xyz - in.world_position);
let half_dir = normalize(view_dir + light_dir);
let diffuse_strength = max(dot(tangent_normal, light_dir), 0.0);
let diffuse_color = light.color * diffuse_strength;
let specular_strength = pow(max(dot(tangent_normal, half_dir), 0.0), 32.0);
let specular_color = specular_strength * light.color;
let result = (ambient_color + diffuse_color + specular_color) * object_color.xyz;
return vec4<f32>(result, object_color.a);
}
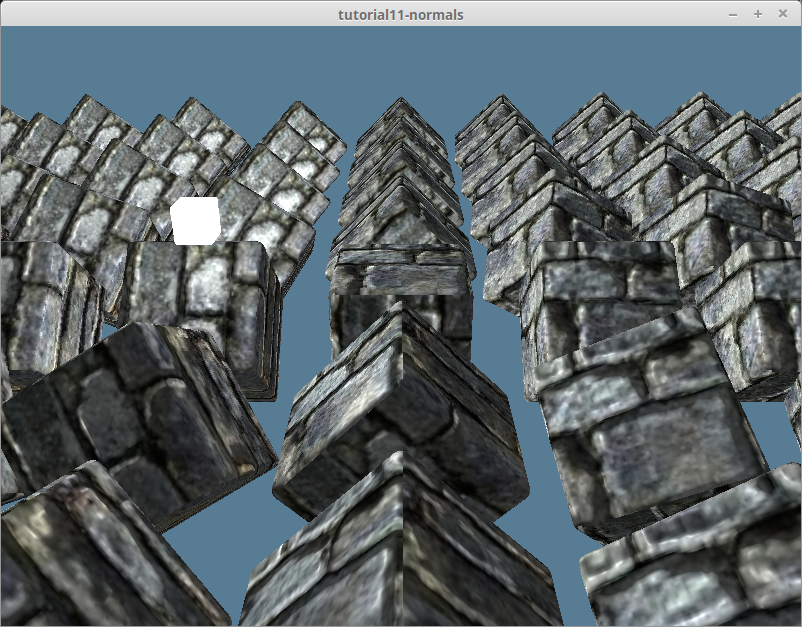
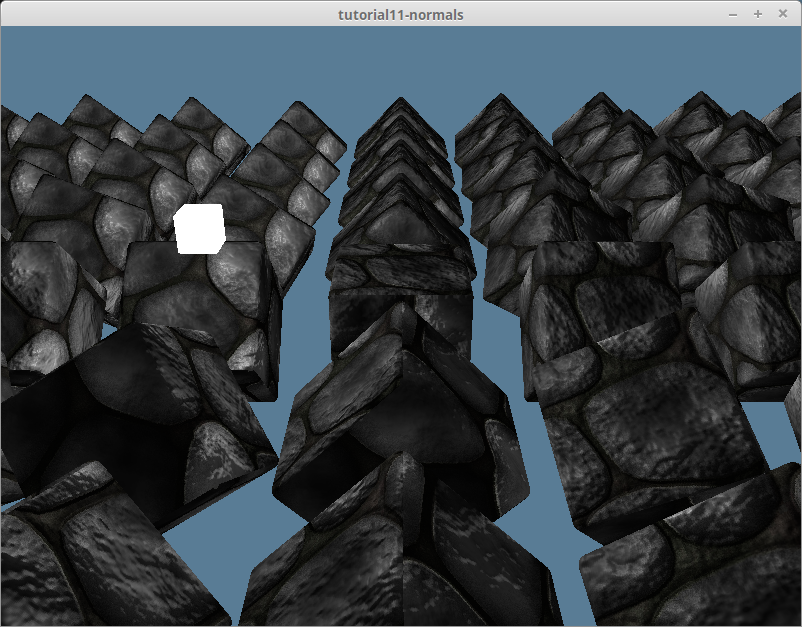
If we run the code now, you'll notice things don't look quite right. Let's compare our results with the last tutorial.
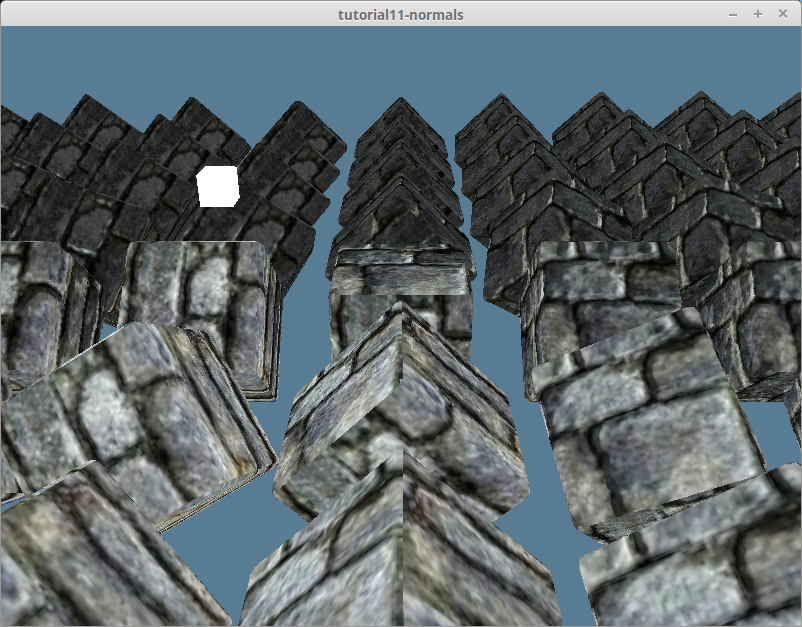
Parts of the scene are dark when they should be lit up, and vice versa.
# Tangent Space to World Space
I mentioned it briefly in the lighting tutorial, that we were doing our lighting calculation in "world space". This meant that the entire scene was oriented with respect to the world's coordinate system. When we pull the normal data from our normal texture, all the normals are in what's known as pointing roughly in the positive z direction. That means that our lighting calculation thinks all of the surfaces of our models are facing in roughly the same direction. This is referred to as tangent space.
If we remember the lighting-tutorial, we used the vertex normal to indicate the direction of the surface. It turns out we can use that to transform our normals from tangent space into world space. In order to do that we need to draw from the depths of linear algebra.
We can create a matrix that represents a coordinate system using 3 vectors that are perpendicular (or orthonormal) to each other. Basically we define the x, y, and z axes of our coordinate system.
let coordinate_system = mat3x3<f32>(
vec3(1, 0, 0), // x axis (right)
vec3(0, 1, 0), // y axis (up)
vec3(0, 0, 1) // z axis (forward)
);
We're going to create a matrix that will represent the coordinate space relative to our vertex normals. We're then going to use that to transform our normal map data to be in world space.
# The tangent, and the bitangent
We have one of the 3 vectors we need, the normal. What about the others? These are the tangent, and bitangent vectors. A tangent represents any vector that is parallel with a surface (aka. doesn't intersect with it). The tangent is always perpendicular to the normal vector. The bitangent is a tangent vector that is perpendicular to the other tangent vector. Together the tangent, bitangent, and normal represent the x, y, and z axes respectively.
Some model formats include the tanget and bitangent (sometimes called the binormal) in the vertex data, but OBJ does not. We'll have to calculate them manually. Luckily we can derive our tangent, and bitangent from our existing vertex data. Take a look at the following diagram.

Basically we can use the edges of our triangles, and our normal to calculate the tangent and bitangent. But first, we need to update our ModelVertex struct in model.rs.
#[repr(C)]
#[derive(Copy, Clone, Debug, bytemuck::Pod, bytemuck::Zeroable)]
pub struct ModelVertex {
position: [f32; 3],
tex_coords: [f32; 2],
normal: [f32; 3],
// NEW!
tangent: [f32; 3],
bitangent: [f32; 3],
}
We'll need to upgrade our VertexBufferLayout as well.
impl Vertex for ModelVertex {
fn desc<'a>() -> wgpu::VertexBufferLayout<'a> {
use std::mem;
wgpu::VertexBufferLayout {
array_stride: mem::size_of::<ModelVertex>() as wgpu::BufferAddress,
step_mode: wgpu::VertexStepMode::Vertex,
attributes: &[
// ...
// Tangent and bitangent
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 8]>() as wgpu::BufferAddress,
shader_location: 3,
format: wgpu::VertexFormat::Float32x3,
},
wgpu::VertexAttribute {
offset: mem::size_of::<[f32; 11]>() as wgpu::BufferAddress,
shader_location: 4,
format: wgpu::VertexFormat::Float32x3,
},
],
}
}
}
Now we can calculate the new tangent, and bitangent vectors.
impl Model {
pub fn load<P: AsRef<Path>>(
device: &wgpu::Device,
queue: &wgpu::Queue,
layout: &wgpu::BindGroupLayout,
path: P,
) -> Result<Self> {
// ...
for m in obj_models {
let mut vertices = Vec::new();
for i in 0..m.mesh.positions.len() / 3 {
vertices.push(ModelVertex {
position: [
// ...
],
tex_coords: [
// ...
],
normal: [
// ...
],
// ...
// We'll calculate these later
tangent: [0.0; 3],
bitangent: [0.0; 3],
});
}
let indices = &m.mesh.indices;
let mut triangles_included = (0..vertices.len()).collect::<Vec<_>>();
// Calculate tangents and bitangets. We're going to
// use the triangles, so we need to loop through the
// indices in chunks of 3
for c in indices.chunks(3) {
let v0 = vertices[c[0] as usize];
let v1 = vertices[c[1] as usize];
let v2 = vertices[c[2] as usize];
let pos0: cgmath::Vector3<_> = v0.position.into();
let pos1: cgmath::Vector3<_> = v1.position.into();
let pos2: cgmath::Vector3<_> = v2.position.into();
let uv0: cgmath::Vector2<_> = v0.tex_coords.into();
let uv1: cgmath::Vector2<_> = v1.tex_coords.into();
let uv2: cgmath::Vector2<_> = v2.tex_coords.into();
// Calculate the edges of the triangle
let delta_pos1 = pos1 - pos0;
let delta_pos2 = pos2 - pos0;
// This will give us a direction to calculate the
// tangent and bitangent
let delta_uv1 = uv1 - uv0;
let delta_uv2 = uv2 - uv0;
// Solving the following system of equations will
// give us the tangent and bitangent.
// delta_pos1 = delta_uv1.x * T + delta_u.y * B
// delta_pos2 = delta_uv2.x * T + delta_uv2.y * B
// Luckily, the place I found this equation provided
// the solution!
let r = 1.0 / (delta_uv1.x * delta_uv2.y - delta_uv1.y * delta_uv2.x);
let tangent = (delta_pos1 * delta_uv2.y - delta_pos2 * delta_uv1.y) * r;
// We flip the bitangent to enable right-handed normal
// maps with wgpu texture coordinate system
let bitangent = (delta_pos2 * delta_uv1.x - delta_pos1 * delta_uv2.x) * -r;
// We'll use the same tangent/bitangent for each vertex in the triangle
vertices[c[0] as usize].tangent =
(tangent + cgmath::Vector3::from(vertices[c[0] as usize].tangent)).into();
vertices[c[1] as usize].tangent =
(tangent + cgmath::Vector3::from(vertices[c[1] as usize].tangent)).into();
vertices[c[2] as usize].tangent =
(tangent + cgmath::Vector3::from(vertices[c[2] as usize].tangent)).into();
vertices[c[0] as usize].bitangent =
(bitangent + cgmath::Vector3::from(vertices[c[0] as usize].bitangent)).into();
vertices[c[1] as usize].bitangent =
(bitangent + cgmath::Vector3::from(vertices[c[1] as usize].bitangent)).into();
vertices[c[2] as usize].bitangent =
(bitangent + cgmath::Vector3::from(vertices[c[2] as usize].bitangent)).into();
// Used to average the tangents/bitangents
triangles_included[c[0] as usize] += 1;
triangles_included[c[1] as usize] += 1;
triangles_included[c[2] as usize] += 1;
}
// Average the tangents/bitangents
for (i, n) in triangles_included.into_iter().enumerate() {
let denom = 1.0 / n as f32;
let mut v = &mut vertices[i];
v.tangent = (cgmath::Vector3::from(v.tangent) * denom)
.normalize()
.into();
v.bitangent = (cgmath::Vector3::from(v.bitangent) * denom)
.normalize()
.into();
}
Ok(Self { meshes, materials })
}
}
# World Space to Tangent Space
Since the normal map by default is in tangent space, we need to transform all the other variables used in that calculation to tangent space as well. We'll need to construct the tangent matrix in the vertex shader. First we need our VertexInput to include the tangent and bitangents we calculated earlier.
struct VertexInput {
[[location(0)]] position: vec3<f32>;
[[location(1)]] tex_coords: vec2<f32>;
[[location(2)]] normal: vec3<f32>;
[[location(3)]] tangent: vec3<f32>;
[[location(4)]] bitangent: vec3<f32>;
};
Next we'll construct the tangent_matrix and then transform the vertex, light and view position into tangent space.
struct VertexOutput {
[[builtin(position)]] clip_position: vec4<f32>;
[[location(0)]] tex_coords: vec2<f32>;
// UPDATED!
[[location(1)]] tangent_position: vec3<f32>;
[[location(2)]] tangent_light_position: vec3<f32>;
[[location(3)]] tangent_view_position: vec3<f32>;
};
[[stage(vertex)]]
fn vs_main(
model: VertexInput,
instance: InstanceInput,
) -> VertexOutput {
// ...
let normal_matrix = mat3x3<f32>(
instance.normal_matrix_0,
instance.normal_matrix_1,
instance.normal_matrix_2,
);
// Construct the tangent matrix
let world_normal = normalize(normal_matrix * model.normal);
let world_tangent = normalize(normal_matrix * model.tangent);
let world_bitangent = normalize(normal_matrix * model.bitangent);
let tangent_matrix = transpose(mat3x3<f32>(
world_tangent,
world_bitangent,
world_normal,
));
let world_position = model_matrix * vec4<f32>(model.position, 1.0);
var out: VertexOutput;
out.clip_position = camera.view_proj * world_position;
out.tex_coords = model.tex_coords;
out.tangent_position = tangent_matrix * world_position.xyz;
out.tangent_view_position = tangent_matrix * camera.view_pos.xyz;
out.tangent_light_position = tangent_matrix * light.position;
return out;
}
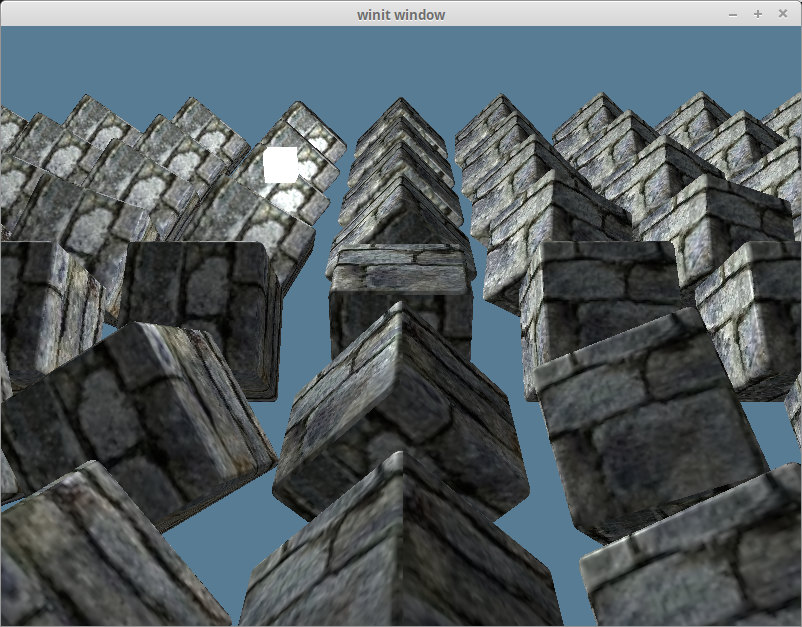
Finally we'll update the fragment shader to use these transformed lighting values.
[[stage(fragment)]]
fn fs_main(in: VertexOutput) -> [[location(0)]] vec4<f32> {
// Sample textures..
// Create the lighting vectors
let tangent_normal = object_normal.xyz * 2.0 - 1.0;
let light_dir = normalize(in.tangent_light_position - in.tangent_position);
let view_dir = normalize(in.tangent_view_position - in.tangent_position);
// Perform lighting calculations...
}
We get the following from this calculation.
# Srgb and normal textures
We've been using Rgba8UnormSrgb for all our textures. The Srgb bit specifies that we will be using standard red green blue color space. This is also known as linear color space. Linear color space has less color density. Even so, it is often used for diffuse textures, as they are typically made in Srgb color space.
Normal textures aren't made with Srgb. Using Rgba8UnormSrgb can changes how the GPU samples the texture. This can make the resulting simulation less accurate. We can avoid these issues by using Rgba8Unorm when we create the texture. Let's add an is_normal_map method to our Texture struct.
pub fn from_image(
device: &wgpu::Device,
queue: &wgpu::Queue,
img: &image::DynamicImage,
label: Option<&str>,
is_normal_map: bool, // NEW!
) -> Result<(Self, wgpu::CommandBuffer), failure::Error> {
// ...
let texture = device.create_texture(&wgpu::TextureDescriptor {
label,
size,
mip_level_count: 1,
sample_count: 1,
dimension: wgpu::TextureDimension::D2,
// UPDATED!
format: if is_normal_map {
wgpu::TextureFormat::Rgba8Unorm
} else {
wgpu::TextureFormat::Rgba8UnormSrgb
},
usage: wgpu::TextureUsages::TEXTURE_BINDING | wgpu::TextureUsages::COPY_DST,
});
// ...
Ok((Self { texture, view, sampler }, cmd_buffer))
}
We'll need to propagate this change to the other methods that use this.
pub fn load<P: AsRef<Path>>(
device: &wgpu::Device,
queue: &wgpu::Queue,
path: P,
is_normal_map: bool, // NEW!
) -> Result<(Self, wgpu::CommandBuffer), failure::Error> {
// ...
let img = image::open(path)?;
Self::from_image(device, queue, &img, label, is_normal_map) // UPDATED!
}
// ...
#[allow(dead_code)]
pub fn from_bytes(
device: &wgpu::Device,
queue: &wgpu::Queue,
bytes: &[u8],
label: &str,
is_normal_map: bool, // NEW!
) -> Result<(Self, wgpu::CommandBuffer), failure::Error> {
let img = image::load_from_memory(bytes)?;
Self::from_image(device, &img, Some(label), is_normal_map)
}
We need to update model.rs as well.
let diffuse_path = mat.diffuse_texture;
// UPDATED!
let diffuse_texture = texture::Texture::load(device, queue, containing_folder.join(diffuse_path), false)?;
let normal_path = mat.normal_texture;
// UPDATED!
let normal_texture = texture::Texture::load(device, queue, containing_folder.join(normal_path), true)?;
That gives us the following.
# Unrelated stuff
While I was debugging the normal mapping code, I made a few changes to model.rs that I haven't mentioned. I wanted to be able to see the model with different textures, so I modified the Material struct to have a new() method.
impl Material {
pub fn new(
device: &wgpu::Device,
name: &str,
diffuse_texture: texture::Texture,
normal_texture: texture::Texture,
layout: &wgpu::BindGroupLayout,
) -> Self {
let bind_group = device.create_bind_group(&wgpu::BindGroupDescriptor {
layout,
entries: &[
wgpu::BindGroupEntry {
binding: 0,
resource: wgpu::BindingResource::TextureView(&diffuse_texture.view),
},
wgpu::BindGroupEntry {
binding: 1,
resource: wgpu::BindingResource::Sampler(&diffuse_texture.sampler),
},
wgpu::BindGroupEntry {
binding: 2,
resource: wgpu::BindingResource::TextureView(&normal_texture.view),
},
wgpu::BindGroupEntry {
binding: 3,
resource: wgpu::BindingResource::Sampler(&normal_texture.sampler),
},
],
label: Some(name),
});
Self {
name: String::from(name),
diffuse_texture,
normal_texture,
bind_group,
}
}
}
This simplifies the code in Model::load().
let mut materials = Vec::new();
for mat in obj_materials {
let diffuse_path = mat.diffuse_texture;
let diffuse_texture = texture::Texture::load(device, queue, containing_folder.join(diffuse_path), false)?;
let normal_path = mat.normal_texture;
let normal_texture = texture::Texture::load(device, queue, containing_folder.join(normal_path), true)?;
materials.push(Material::new(
device,
&mat.name,
diffuse_texture,
normal_texture,
layout,
));
}
I also added a draw_model_instanced_with_material() to the DrawModel trait.
pub trait DrawModel<'a> {
// ...
fn draw_model_instanced_with_material(
&mut self,
model: &'a Model,
material: &'a Material,
instances: Range<u32>,
camera_bind_group: &'a wgpu::BindGroup,
light_bind_group: &'a wgpu::BindGroup,
);
}
impl<'a, 'b> DrawModel<'b> for wgpu::RenderPass<'a>
where
'b: 'a,
{
// ...
fn draw_model_instanced_with_material(
&mut self,
model: &'b Model,
material: &'b Material,
instances: Range<u32>,
camera_bind_group: &'b wgpu::BindGroup,
light_bind_group: &'b wgpu::BindGroup,
) {
for mesh in &model.meshes {
self.draw_mesh_instanced(mesh, material, instances.clone(), camera_bind_group, light_bind_group);
}
}
}
I found a cobblestone texture with matching normal map, and created a debug_material for that.
// main.rs
impl State {
async fn new(window: &Window) -> Result<Self> {
// ...
let debug_material = {
let diffuse_bytes = include_bytes!("../res/cobble-diffuse.png");
let normal_bytes = include_bytes!("../res/cobble-normal.png");
let diffuse_texture = texture::Texture::from_bytes(&device, &queue, diffuse_bytes, "res/alt-diffuse.png", false).unwrap();
let normal_texture = texture::Texture::from_bytes(&device, &queue, normal_bytes, "res/alt-normal.png", true).unwrap();
model::Material::new(&device, "alt-material", diffuse_texture, normal_texture, &texture_bind_group_layout)
};
Self {
// ...
#[allow(dead_code)]
debug_material,
}
}
}
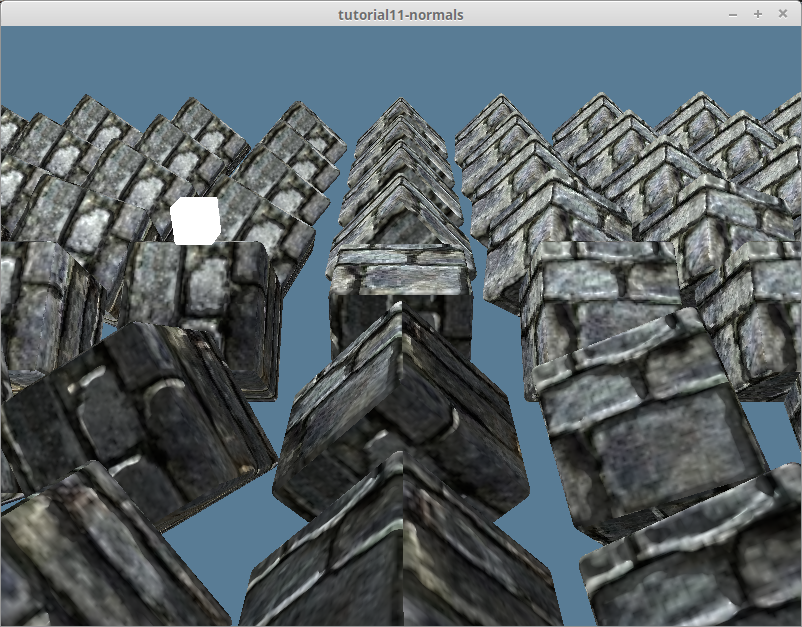
Then to render with the debug_material I used the draw_model_instanced_with_material() that I created.
render_pass.set_pipeline(&self.render_pipeline);
render_pass.draw_model_instanced_with_material(
&self.obj_model,
&self.debug_material,
0..self.instances.len() as u32,
&self.camera_bind_group,
&self.light_bind_group,
);
That gives us something like this.
You can find the textures I use in the Github Repository.