# 深度缓冲区
让我们从一个特定的角度来仔细看看最后一个例子:
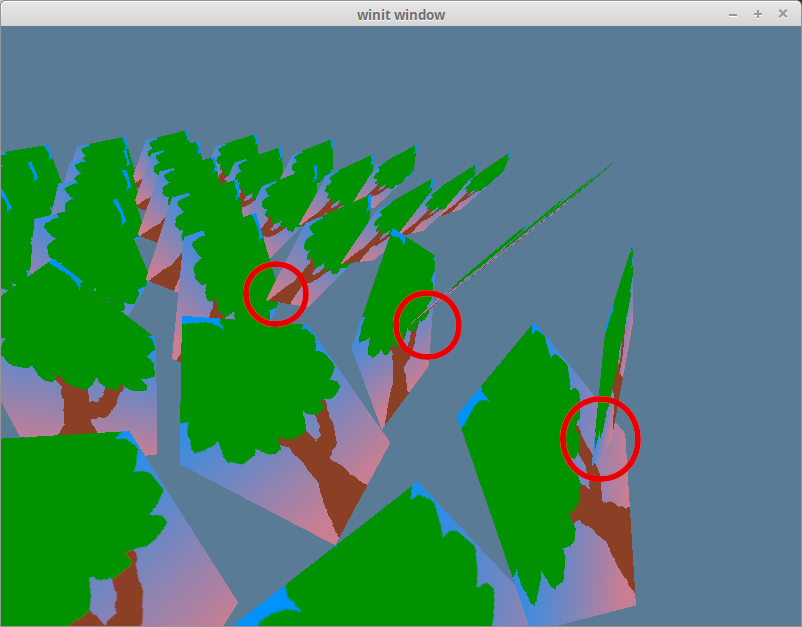
本应在后面的模型被渲染到了本应在前面的模型之前,这是绘制顺序所导致的问题。默认情况下,来自新对象的像素数据将覆盖同位置的旧像素数据。
有两种方法来解决这个问题:要么将数据从后往前排序,要么使用深度缓冲区(depth buffer)。
# 从后向前排序
这是二维渲染中的常用方法,因为此时很容易直接基于 Z 轴顺序确定前后层级关系。但在三维渲染中,由于物体顺序会随相机角度变化而变化,所以处理起来会有点棘手。
一种简单的方法是直接按物体与摄像机之间距离来排序。但这种方法也有缺陷,因为当一个大物体在一个小物体后面时,大物体中本应在小物体前面的部分会被渲染到后面。我们也会遇到物体本身存在重叠时的问题。
因此如果想正确实现这一效果,就需要具备像素级的精度。这就是深度缓冲区的作用。
# 处理像素深度
深度缓冲区是一个黑白纹理,其中存储了已渲染像素的 Z 轴坐标。在绘制新像素时,wgpu 可以用它来决定是替换数据还是将其保留。这种技术就叫深度测试,它能解决我们的绘制顺序问题,还无需我们自己对物体排序!
让我们在 texture.rs 中增加一个函数来创建深度纹理:
impl Texture {
pub const DEPTH_FORMAT: wgpu::TextureFormat = wgpu::TextureFormat::Depth32Float; // 1.
pub fn create_depth_texture(device: &wgpu::Device, config: &wgpu::SurfaceConfiguration, label: &str) -> Self {
let size = wgpu::Extent3d { // 2.
width: config.width,
height: config.height,
depth_or_array_layers: 1,
};
let desc = wgpu::TextureDescriptor {
label: Some(label),
size,
mip_level_count: 1,
sample_count: 1,
dimension: wgpu::TextureDimension::D2,
format: Self::DEPTH_FORMAT,
usage: wgpu::TextureUsages::RENDER_ATTACHMENT // 3.
| wgpu::TextureUsages::TEXTURE_BINDING,
};
let texture = device.create_texture(&desc);
let view = texture.create_view(&wgpu::TextureViewDescriptor::default());
let sampler = device.create_sampler(
&wgpu::SamplerDescriptor { // 4.
address_mode_u: wgpu::AddressMode::ClampToEdge,
address_mode_v: wgpu::AddressMode::ClampToEdge,
address_mode_w: wgpu::AddressMode::ClampToEdge,
mag_filter: wgpu::FilterMode::Linear,
min_filter: wgpu::FilterMode::Linear,
mipmap_filter: wgpu::FilterMode::Nearest,
compare: Some(wgpu::CompareFunction::LessEqual), // 5.
lod_min_clamp: -100.0,
lod_max_clamp: 100.0,
..Default::default()
}
);
Self { texture, view, sampler }
}
}
- 我们需要
DEPTH_FORMAT来建立render_pipeline管线中的深度阶段,并创建深度纹理。 - 如果想得到正确的渲染效果,深度纹理需要和屏幕一样大。我们可以用
config来确保深度纹理与 surface 纹理的尺寸相同。 - 由于我们要对这个纹理做渲染,因此需要给它添加
RENDER_ATTACHMENT配置。 - 从技术上而言,我们不需要深度纹理的采样器,但
Texturestruct 需要它。并且如果我们想自己对深度纹理做采样,这时也会需要使用采样器。 - 如果我们决定渲染深度纹理,需要使用
CompareFunction::LessEqual。这是由samplerShadow和sampler2DShadow()与 GLSL 中的texture()函数之间的关系所决定的。
我们在 State::new() 中来创建 depth_texture:
let depth_texture = texture::Texture::create_depth_texture(&device, &config, "depth_texture");
我们需要修改 render_pipeline 来启用深度测试:
let render_pipeline = device.create_render_pipeline(&wgpu::RenderPipelineDescriptor {
// ...
depth_stencil: Some(wgpu::DepthStencilState {
format: texture::Texture::DEPTH_FORMAT,
depth_write_enabled: true,
depth_compare: wgpu::CompareFunction::Less, // 1.
stencil: wgpu::StencilState::default(), // 2.
bias: wgpu::DepthBiasState::default(),
}),
// ...
});
depth_compare函数用于确定何时丢弃一个新像素,使用LESS意味着像素将从前往后绘制。下面是它所有的可选值:
#[repr(C)]
#[derive(Copy, Clone, Debug, Hash, Eq, PartialEq)]
#[cfg_attr(feature = "serde", derive(Serialize, Deserialize))]
pub enum CompareFunction {
Undefined = 0,
Never = 1,
Less = 2,
Equal = 3,
LessEqual = 4,
Greater = 5,
NotEqual = 6,
GreaterEqual = 7,
Always = 8,
}
- 还有一种缓冲区叫做模板缓冲区(stencil buffer),一般模板缓冲区和深度缓冲区会存储在同一个纹理中,相应字段用于控制模板测试。由于这里没有使用模板缓冲区,这里将使用默认值。我们将在以后介绍模板缓冲区。
另外别忘了在 State 中存储 depth_texture:
Self {
// ...
depth_texture,
}
以及还要记得修改 resize() 方法,在其中创建一个新的 depth_texture 和 depth_texture_view:
fn resize(&mut self, new_size: winit::dpi::PhysicalSize<u32>) {
// ...
self.depth_texture = texture::Texture::create_depth_texture(&self.device, &self.config, "depth_texture");
// ...
}
请确保在更新 config 之后再更新 depth_texture,否则会使得 depth_texture 与 surface 纹理的尺寸不同,进而导致程序崩溃。
我们最后需要修改的是 render() 函数。现在我们已经创建了 depth_texture,但还没有使用它。将它附加到 render pass 的 depth_stencil_attachment 中即可:
let mut render_pass = encoder.begin_render_pass(&wgpu::RenderPassDescriptor {
// ...
depth_stencil_attachment: Some(wgpu::RenderPassDepthStencilAttachment {
view: &self.depth_texture.view,
depth_ops: Some(wgpu::Operations {
load: wgpu::LoadOp::Clear(1.0),
store: true,
}),
stencil_ops: None,
}),
});
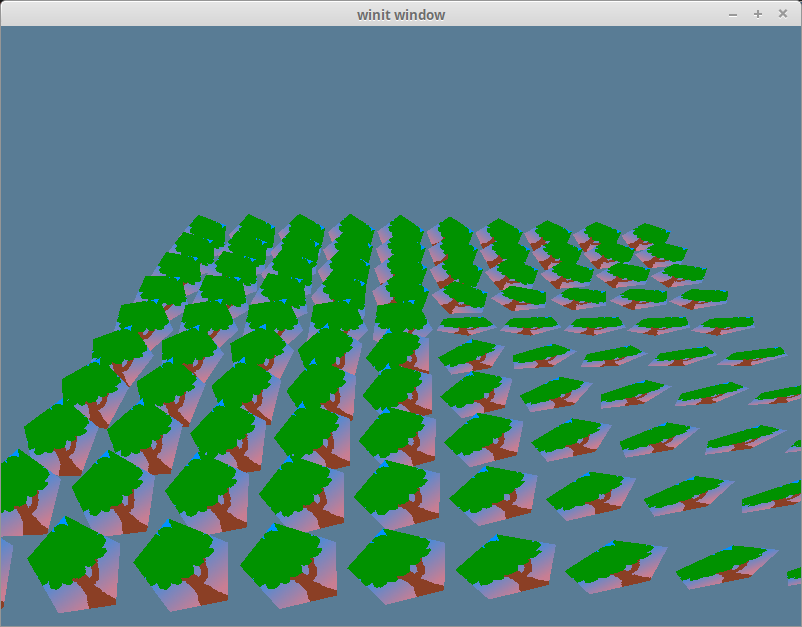
这样就够了!不需要修改着色器代码!如果现在再运行应用,深度问题应该已经修复了。
# 小测验
由于深度缓冲区是一个纹理,我们可以在着色器中对它采样。又因为它是一个深度纹理,我们必须用 samplerShadow uniform 类型和 sampler2DShadow 函数来代替 sampler 和 sampler2D。不妨尝试为深度纹理创建一个 bind group(或重用一个现有的),并将其渲染到屏幕上。